Browse a collection of tutorials and supplemental learning material developed by members of the Flight Systems and Control Lab!
Click this link to view the FSC official Github page.
GitHub Repositories
Flight Animation Framework for MATLAB/Simulink Visualization
A concrete and ready-to-use visualization package written in Matlab for flight simulation.
- Provides a compact and easy way to generate animations from flight simulation data.
- Encapsulates and concentrates individual 3D rendering functions into a single function to provide a clean and concrete interface.
- Click this link to view a detailed description
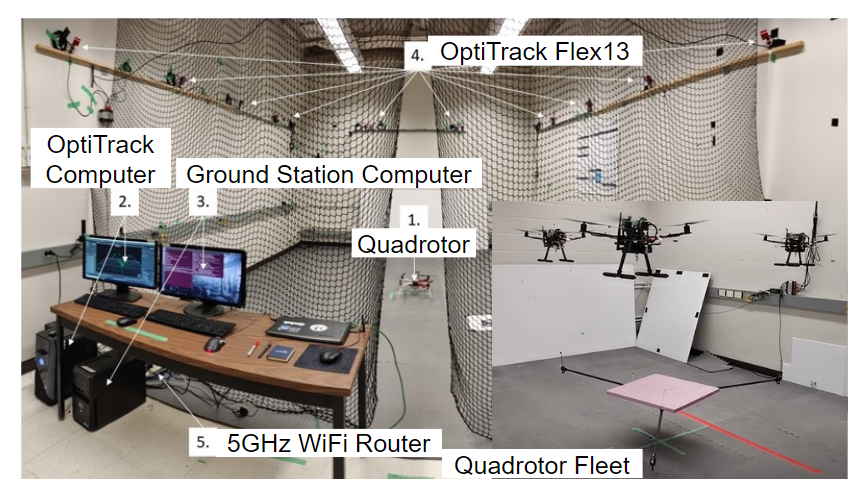
The OptiTrack ROS node is responsible for processing the position and attitude feedback for quadrotor experiments in Flight System and Control Lab (FSC). The OptiTrack node must be downloaded and installed on the ground station desktop/computer. This package supports an arbitrary number of rigid bodies defined in the argument of the launch file. The names of the rigid bodies should be the same as the ones used in the Motive software.
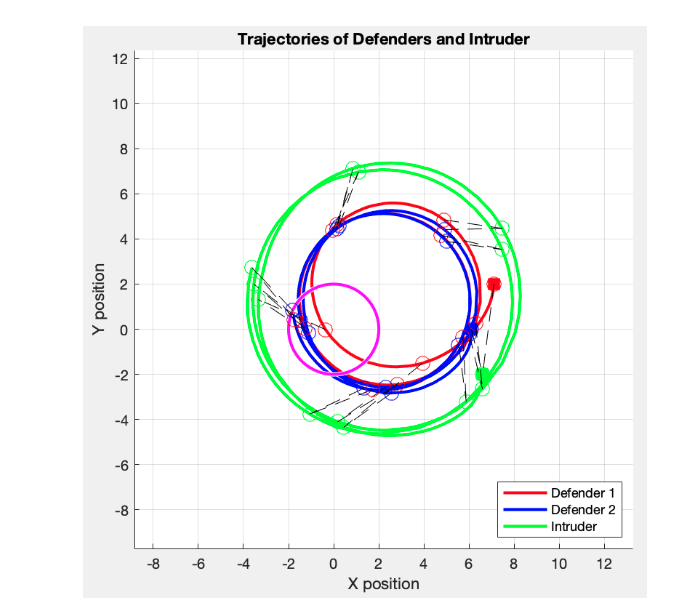
Multiplayer Target Defense Game Between Quadrotors Use Case Studies
This repository hosts the Python and MATLAB simulation code for my final year thesis titled “Multiplayer Target Defense Game Between Quadrotors: Use Case Studies”. It explores a defense game scenario with two defenders and a faster intruder drone, with annotated code and organization derived from Dr. Fu’s paper “Optimal Solution of a Target Defense Game with Two defenders and a Faster Intrude.
Click this link to view the online repository.
Open Courses
How to CMake: An FSC Tutorial.
This is an open CMake tutorial offered by Dr. Longhao Qian from the Flight Systems and Control Lab. This tutorial covers basic and advanced CMake commands and procedures to create a complete CMake project.