This research focuses on the vision-based guidance and navigation problem, specifically within the context of multi-rotor drones and autonomous drone racing. The goal of this work is to develop algorithms that enable flight control and trajectory tracking of quadrotor platform using primarily visual information. Chao Qin is the primary researcher investigating this problem.

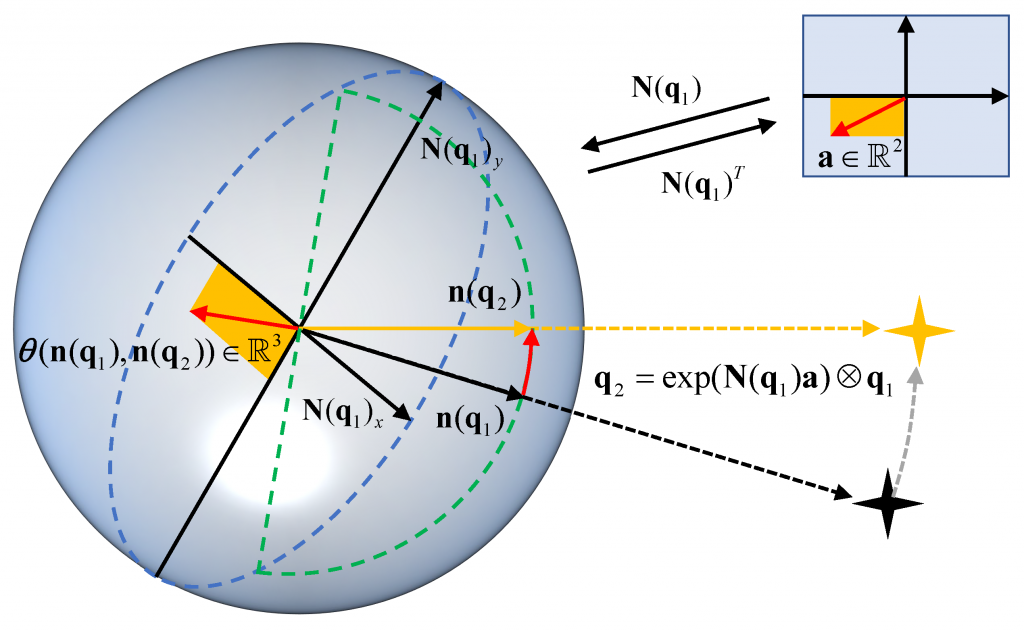
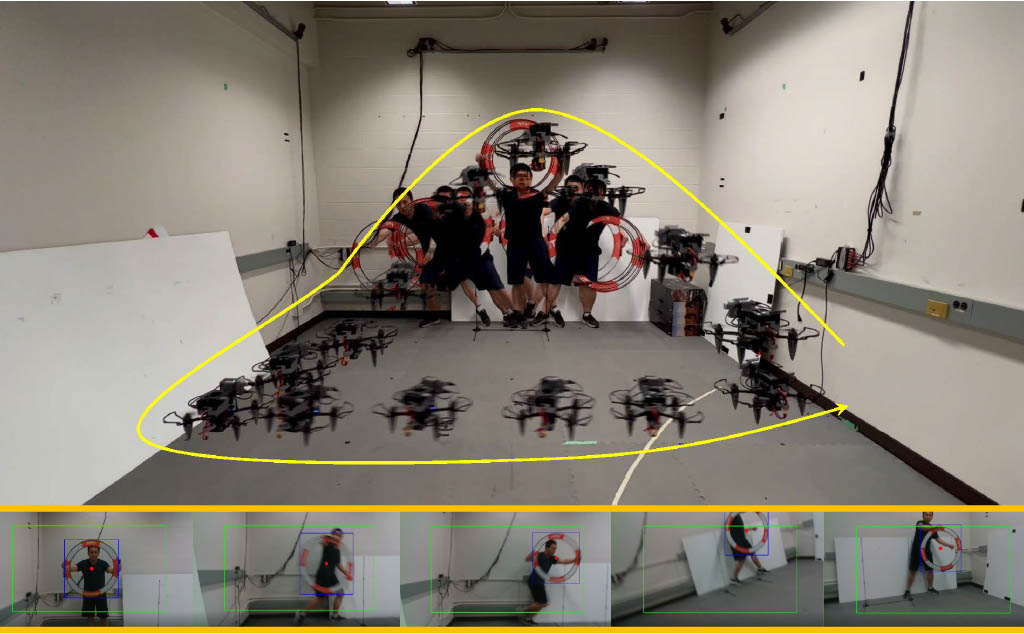
The maintenance of visual features within the sensor field of view (FOV) poses a significant challenge for underactuated aerial vehicles like quadrotors, especially during aggressive maneuvers. However, existing image-based visual servo control (IBVS) methods rely on strict target visibility assumptions or impose excessive constraints on the quadrotor’s agility to meet this requirement. Furthermore, the effectiveness of the visibility constraint defined in prior works remains unverified in aggressive flight tests. To address these issues, we present a robust IBVS scheme for quadrotors to perform aggressive maneuvers while ensuring target visibility. Based on the nonlinear model predictive control (NMPC) framework, we propose a novel underactuation compensation scheme to eliminate the need for a virtual camera frame, which enables us to formulate the true target visibility constraint. We then introduce a quaternion-based representation of spherical visual features to handle the nonsmooth vector field problem on the 2-sphere and derive its corresponding image kinematics. We validate our method through three challenging visual servo tasks where agile maneuvers are desired: fast landing, aggressive long-distance flight, and dynamic object tracking.
Participants
Chao Qin (Ph.D. Candidate)
HS Helson Go (Ph.D. Candidate)
Qiuyu Yu (Visiting Graduate Student)
Harry Chen (Summer Student)
Max Michet (Summer Student)
Related Publications
2024
Time-Optimal Gate-Traversing Planner for Autonomous Drone Racing Inproceedings
In: 2024 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Best Paper Award Finalist!, 2024.
2023
Perception-Aware Image-Based Visual Servoing of Aggressive Quadrotor UAVs Journal Article
In: IEEE/ASME Transactions on Mechatronics, 2023.
Perception-Aware Image-Based Visual Servoing of Aggressive Quadrotor UAVs Inproceedings
In: Advanced Intelligent Mechatronics (AIM), IEEE, 2023.
2022
CPA-Planner: Motion Planner with Complete Perception Awareness for Sensing-Limited Quadrotors Journal Article
In: IEEE Robotics and Automation Letters, 2022.